 K.ナガハシ
K.ナガハシ
有名な四足歩行ロボットといえば、ボストン・ダイナミクス社の「SpotMini(スポットミニ)」が挙げられる。日本では建設現場で同ロボットを使った実証実験が行われるなど、実用化を準備する段階まできている。
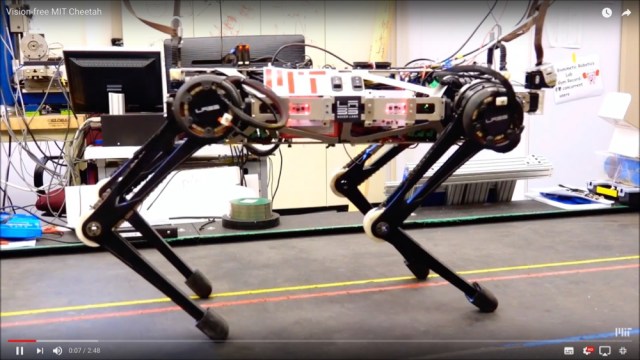
そんななか、米マサチューセッツ工科大学(MIT)が超高性能な新型四足歩行ロボットの動画「Vision-free MIT Cheetah」を公開した。「Cheetah(チーター)3」と呼ばれるロボットの主な特徴は、視覚(カメラ)に頼らず行動する点とのことだが、いったいどんなロボットなのか? 動画で詳細を見ていこう。
・動きの自由度が高い『チーター3』
チーター3の性能を知るにあたり、まずはじめに注目すべきは各部の動きが自由自在なことだ。足の付け根部分は大きく捻(ねじ)れても大丈夫なのに加え、関節部分は前後に曲げることができる。
もちろん、ピョンピョンと飛び跳ねながら移動することも可能で、動画内では屋外の芝生や砂利の上などの不安定な足場の上だって歩く。さらに1本の足だけ使用しない3足歩行なんかも余裕でOK!
また、チーター3はスピード性能にも優れており、ゆったりとした歩きに始まり、軽快な駆け足も披露してみせる。なんなら秒速3m……つまり時速10.8kmでダッシュすることも可能だ。ここまででも有能だが、極めつけは強力なジャンプ力である。
・視覚に頼れない場所で活躍すること間違いなし
動画の2:33あたりでは、高さ76cmのテーブルの前に立つチーター3が特大ジャンプ! テーブルの上へ見事に着地する様子が見られるぞ。そして、これら全ての動きが視覚を使わずにやっているというのがまた凄い。
MITによると、チーター3は接触検出アルゴリズムとモデル予測制御アルゴリズムを組み合わせた「blind locomotion」との機能によって姿勢を制御している。超ざっくり言うと、触覚と予測をもとに動いているロボットというわけだ。
真っ暗で何も見えない現場など、視覚に頼れない場所で活躍すること間違いなしの『チーター3』。近い将来、人間が脚を踏み入れることのできない場所で作業する日も近いかもしれない。
参照元:YouTube、MIT News(英語)
執筆:K.ナガハシ
▼『チーター3』がこちら
 まさか4足歩行ロボットがバク宙するなんて…「ミニチーター」の驚くべき能力を確認できる動画がこちらです
まさか4足歩行ロボットがバク宙するなんて…「ミニチーター」の驚くべき能力を確認できる動画がこちらです チーターの加速力がマジ凄い! レーシングカーとデッドヒートを繰り広げる対決動画がこれだ!!
チーターの加速力がマジ凄い! レーシングカーとデッドヒートを繰り広げる対決動画がこれだ!! 【衝撃事実】チーターの鳴き声がかわいすぎる
【衝撃事実】チーターの鳴き声がかわいすぎる ついに「おしっこをする4足歩行ロボット」をスイスの超一流エンジニアたちが生み出してしまう
ついに「おしっこをする4足歩行ロボット」をスイスの超一流エンジニアたちが生み出してしまう 【動画あり】ピョンピョン跳ねる「4足歩行ロボット」の運動能力がハンパない!
【動画あり】ピョンピョン跳ねる「4足歩行ロボット」の運動能力がハンパない! 池袋中華街で「蚕の串焼き」を食べたら本場の人に心配された話 / ガチ中華『大豊収』の社長にその理由を聞いてみた
池袋中華街で「蚕の串焼き」を食べたら本場の人に心配された話 / ガチ中華『大豊収』の社長にその理由を聞いてみた 【4コマ】魔王軍はホワイト企業 1918話目「入隊案内④」
【4コマ】魔王軍はホワイト企業 1918話目「入隊案内④」 60分2000円のシャトレーゼのスイーツバイキング知ってる? 平日にひとりで行ったら、情けない結果になった
60分2000円のシャトレーゼのスイーツバイキング知ってる? 平日にひとりで行ったら、情けない結果になった 【Amazon】最大75%オフ! 価格が一気に下がった注目アイテム181選(3月3日)
【Amazon】最大75%オフ! 価格が一気に下がった注目アイテム181選(3月3日) 【価格差わずか42円】コンビニおにぎりの高騰で伊勢丹の方がコスパ高くなってる? ツナマヨで検証してみた
【価格差わずか42円】コンビニおにぎりの高騰で伊勢丹の方がコスパ高くなってる? ツナマヨで検証してみた 【Amazon】最大60%オフ! 価格が一気に下がった注目アイテム11選(2月24日)
【Amazon】最大60%オフ! 価格が一気に下がった注目アイテム11選(2月24日) 徒歩10時間、新宿から横浜中華街まで歩いた人にありがちなこと45連発
徒歩10時間、新宿から横浜中華街まで歩いた人にありがちなこと45連発 【Amazon】最大68%オフ! 価格が一気に下がった注目アイテム24選(3月2日)
【Amazon】最大68%オフ! 価格が一気に下がった注目アイテム24選(3月2日) 【4コマ】魔王軍はホワイト企業 1911話目「病と変化㉑」
【4コマ】魔王軍はホワイト企業 1911話目「病と変化㉑」 黄ばんだスマホケースを『オキシ漬け』したらこうなった / TPU素材の変色は復活するのか?
黄ばんだスマホケースを『オキシ漬け』したらこうなった / TPU素材の変色は復活するのか? 食が細くなったので叙々苑で高い肉を一皿だけ食べて帰ってみた / 加齢を逆手にとった逆転グルメ
食が細くなったので叙々苑で高い肉を一皿だけ食べて帰ってみた / 加齢を逆手にとった逆転グルメ 【90分間2800円】御用邸チーズケーキも食べ放題!「チーズガーデン」でスイーツビュッフェを楽しもう! エミテラス所沢店
【90分間2800円】御用邸チーズケーキも食べ放題!「チーズガーデン」でスイーツビュッフェを楽しもう! エミテラス所沢店 【13時まで】カインズで買い物ついでに「300円の朝ごはん」を食べてみた
【13時まで】カインズで買い物ついでに「300円の朝ごはん」を食べてみた 【検証】10年間ほぼ毎日飲んでる「コーヒー」を1週間断ってみたらこうだった
【検証】10年間ほぼ毎日飲んでる「コーヒー」を1週間断ってみたらこうだった 【雑草対策】カインズで598円「撒くだけで防草できる人工砂」の効果がヤバ過ぎた / お財布にも環境にも優しい超画期的アイテム
【雑草対策】カインズで598円「撒くだけで防草できる人工砂」の効果がヤバ過ぎた / お財布にも環境にも優しい超画期的アイテム 【検証】「スタバはどのサイズを頼んでも量は一緒」という動画が出回る → 実際に試してみた
【検証】「スタバはどのサイズを頼んでも量は一緒」という動画が出回る → 実際に試してみた オニヤンマのフィギュアが虫よけになるってほんと? 2週間かけて試してみた正直な感想
オニヤンマのフィギュアが虫よけになるってほんと? 2週間かけて試してみた正直な感想 何も期待せず「カメムシブロック」ってスプレーを窓に吹いたら後日ヤバイことになっていた【100万円の古民家】
何も期待せず「カメムシブロック」ってスプレーを窓に吹いたら後日ヤバイことになっていた【100万円の古民家】 動きが超リアルな「魚型ロボット」現る / しかも操縦機はスーファミのコントローラー
動きが超リアルな「魚型ロボット」現る / しかも操縦機はスーファミのコントローラー 【衝撃格闘動画】不気味でキモチ悪いロボット犬 vs 普通の犬
【衝撃格闘動画】不気味でキモチ悪いロボット犬 vs 普通の犬 【ほぼ人間】2足歩行ロボット『アトラス』さん、今度は軽やかにジョギングをする
【ほぼ人間】2足歩行ロボット『アトラス』さん、今度は軽やかにジョギングをする 【衝撃動画】羽生選手もビックリ!? スピン可能な「車輪付き二足歩行ロボット」の運動能力がハンパねぇ!
【衝撃動画】羽生選手もビックリ!? スピン可能な「車輪付き二足歩行ロボット」の運動能力がハンパねぇ! まるで小動物! ピョンピョン跳ねる『ジャンピングロボット』が大変興味深い / ネットの声「なんか可愛い」「これはすごい」など
まるで小動物! ピョンピョン跳ねる『ジャンピングロボット』が大変興味深い / ネットの声「なんか可愛い」「これはすごい」など 【ロボット監視?】竹中工務店とソフトバンクが「あの犬型ロボット」の実証実験を実施! 作業を手伝うのかと思ったら……
【ロボット監視?】竹中工務店とソフトバンクが「あの犬型ロボット」の実証実験を実施! 作業を手伝うのかと思ったら…… キモいと言われた「犬型ロボット」がスタイリッシュに進化! 新型の『SpotMini』がまるで生物!!
キモいと言われた「犬型ロボット」がスタイリッシュに進化! 新型の『SpotMini』がまるで生物!! 【動画】上半身なし! 下半身しかない「2足歩行ロボット」が高性能すぎる件
【動画】上半身なし! 下半身しかない「2足歩行ロボット」が高性能すぎる件 「キモい犬型ロボット」が進化しすぎ! ドアを開けるだけでなく助け合うことも可能に
「キモい犬型ロボット」が進化しすぎ! ドアを開けるだけでなく助け合うことも可能に 【動画あり】AIBOの再来かも!「キモい」「不気味」と話題になったあの『4足歩行ロボット』が劇的に進化!!
【動画あり】AIBOの再来かも!「キモい」「不気味」と話題になったあの『4足歩行ロボット』が劇的に進化!! 【動画あり】完璧な二足歩行をするクマが激撮される
【動画あり】完璧な二足歩行をするクマが激撮される 【動画アリ】搭乗・操縦可能!! 全長8.5メートル総重量7.3トンの2足歩行ロボ「MONONOFU」が超スゴイ!! 製造裏話がヤバい!
【動画アリ】搭乗・操縦可能!! 全長8.5メートル総重量7.3トンの2足歩行ロボ「MONONOFU」が超スゴイ!! 製造裏話がヤバい!